Quetzalcoatlus was one of the robots that we built for the 2012 Vex Robotics World Championships College Challenge, and played as part of the AURA2 team which placed 11th after qualifications and finished as a quarter-finalist.
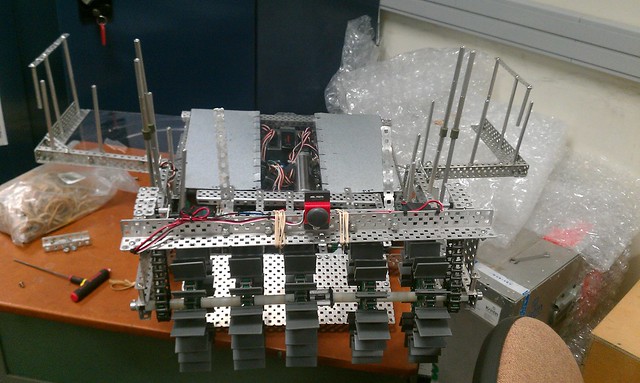
For one of our teams, we wanted our interaction robot to put all the objects from the interaction zone into our isolation zone. Quetzal was the design that we came up with to do this. It uses a 18 inch wide top sucker to pull up to ~10 objects into the robot, then has a rotating, misaligned 4-bar to lift all of them over the wall. This lift is used because it is very efficient, because none of the objects are lifted very far. Even though it only has two 393’s on the lift, it can lift about 9 pounds over its back.
In addition to this, it has two wings that pneumatically unfold, in order to have more capacity. When unfolded, the robot has a width of about ~26 inches.
Drive: 6x 269, 2×393, geared at 2:1 for speed on each side, on 2.75” wheels.
Arm: 2×393 at 1:7. Only needs elastic when lifting very large loads.
Intake: 2×296, 1:2 for torque
Wings: One pneumatic piston each side, allowing individual control.
Sensors: Quetzal has by far the least sensors of any of our college bots, using two shaft encoders, three potentiometers, and three bumpers.
Video of Quetzal driving around the lab: http://www.youtube.com/watch?v=Sw3b8EiXKwI
Videos of Quetzal playing in matches at the World Champs: http://www.youtube.com/playlist?list=PL0B00CF593F9116E9